


روبات iRobot PackBot در سال 2001 ساخته شد , اما تا بعد از واقعه 11 سپتامبر كارایی نداشت. از این روبات برای پیدا كردن افرادی كه در ویرانه های برج های دوقلو در نیویورك گرفتار شده بودند, استفاده كردند. این روبات به دلیل شكل خاصی كه دارد, می تواند به مكان های تنگ و تاریك وارد شود و از مانع بلند به راحتی عبور كند. این روبات می تواند درون آب هم شنا كند. علاوه بر این به كمك دوربین هایی كه درونش تعبیه شده, اجسام دور و برش را تشخیص می دهد و شی مورد نظرش را به وسیله چنگكی كه دارد بیرون می كشد.

موضوعات مرتبط: رباتیک ، ،

اگرچه استفاده از پهبادهای شخصی در حال زیاد شدن است، اما هنوز عدهی زیادی از افراد از کار با ملخهای این دستگاهها وحشت دارند. اما این پرههای چرخان نه تنها ممکن است موجب آسیب رساندن به انسانها شوند، بلکه در طی تصادفات و سقوطها نیز میتوانند آسیب ببینند. به همین دلیل شرکت کالیفرنیایی Polyhelo به ساخت Nano Tornado اقدام نمود که یک کوادکوپتر محسوب میشود اما به جای پایههای باز از چهار فن کانالی استفاده میکند.

مزایای زیادی در طراحی منحصربفرد Nano Tornado وجود دارد. ابتدا، در صورت برخورد به انسانها آسیبی به آنها نمیرسد، همچنین اجزای این کوادکوپتر در صورت برخورد به اشیا یا فرود بد آسیب نمیبینند. به این ترتیب میتوان از آن در عملیات با ریسک بالا مانند پرواز در نزدیکی شاخههای درختان یا در فضاهای تنگ استفاده کرد.
از آنجایی که خبر از بازو یا ملخ رو به بیرون نیست، میتوان به راحتی این کوادکوپتر را در کیفهایی جهت حملونقل قرار داد. علاوه بر این اگر یک مکان تیکآف/فرود خوب وجود نداشته باشد، این کوادکوپتر میتواند موقعیت خود را در هوا تثبیت کرده و سپس بر روی دست یک انسان فرود آید. زمان پرواز این کوادکوپتر تنها پنج دقیقه است، اگرچه باتری آن قابل تعویض با یک باتری شارژ شده میباشد.
منبع : gizmag
موضوعات مرتبط: رباتیک ، تکنولوژی نو ، ،

اگرچه پیش از این شاهد توسعهی چندین نوع بازوی پروتزی کنترل شونده توسط قدرت تفکر بودهایم، اغلب آنها با ایمپلنتهایی کاشته شده درون کورتکس حرکتی مرکز کنترل حرکات مغز انسان، عمل میکنند. درنتیجه حرکت بازوها تاحدی نامنظم بوده، همچنین معمولا تاخیری میان تفکر کاربر و حرکت بازوها وجود دارد. با این حال، اکنون گروهی از پژوهشگران نتایج یک آزمایش را منتشر کرده که در آن این محدودیتها تا حد زیادی کاهش یافتهاند.
در سال 2013، اعضای این گروه – متشکل از دانشمندان کالتک، کالج پزشکی USC Keck، و مرکز توانبخشی ملی Rancho Los Amigos – یک جفت از مجموعهی الکترودهای 4x4mm را در کورتکس پاریتال پشتی (PPC) فردی معلول با نام اریک جی.سورتو کاشتند. برخلاف کورتکس حرکتی که به کنترل مستقیم حرکات میپردازد، PPC مسئول قصد و تفکر و تصمیم به حرکت است.
این مجموعهها در دو بخش از PPC آقای سورتو قرار گرفتند، یکی از آنها برای کنترل تصمیم حرکت بازوها و دیگری برای گرفتن یک وسیله. هر کدام از این مجموعهها حاوی 96 الکترود هستند که به نوبهی خود به نظارت بر فعالیت یک نورون میپردازند. کابلهای کشیده شده از محفظهی جمجه به دو مجموعه الکترود، به یک سیستم کامپیوتری متصل بوده که فعالیت عصبی را به فرامین حرکتی رمزگشایی میکند. سپس این کامپیوتر اقدام به ارسال این فرامین به بازوی رباتیکی مینماید.
پس از مدتی آموزش، سورتو اکنون قادر به استفاده از بازو برای اجرای فعالیتهایی مانند لرزاندن دست، نوشیدن نوشیدنی، و حتی بازی سنگ-کاغذ-قیچی میباشد، علاوه بر این حرکات دست وی اکنون نرمتر و منظمتر صورت میگیرد. او همچنین با استفاده از یک رابط میتواند به کنترل حرکات اشارهگر روی نمایشگر کامپیوتر بپردازد.
منبع : gizmag
موضوعات مرتبط: رباتیک ، تکنولوژی نو ، ،

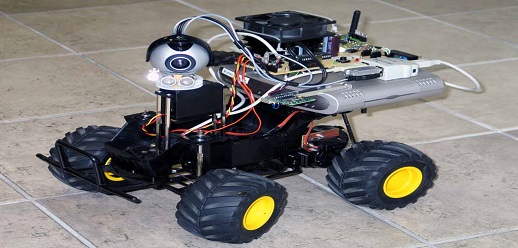
کمپانی Arduino در طول چند سال گذشته توانسته با میکروکنترلرهای تک بورد خود، شهرت زیادی کسب کند. بسیاری از این وسیله ها در ربات ها بکار می روند و این کمپانی با توجه به همین مساله در حال حاضر گام منطقی بعدی خود را به سمت جلو برداشته و به انتشار اولین ربات کامل خود دست زده است.


این ربات 178 در 102 میلی متری با نام ربات Arduino، یک دستگاه چرخ دار دایره ای است که از دو بورد موجود Arduino بهره می برد. بورد کنترل آن که در بالا قرار گرفته، اطلاعات سنسورهای مختلف آن را خوانده و موجب واکنش ربات طبق برنامه داده شده، می شود. بورد موتور در قسمت پایین، موتورها را که دو چرخ را هدایت می کنند، کنترل و نظارت می نماید. دو گوی چرخ کوچک بدون انرژی، در مقابل چرخ ها و برای پشتیبانی از ربات قرار گرفته اند.


برخی از سنسورهای استاندارد و محرک شامل یک قطب نمای دیجیتال، سنسورهای مادون قرمز، صفحه نمایش ال سی دی رنگی، بلندگو، سنسور بستر، LED های نمایش دهنده فعالیت و دو پتانسیومتر در این دستگاه وجود دارند. دستورات ساده را می توان از طریق یک پد کلید کنترل داخلی، برنامه نویسی کرد اگر چه ربات همچنین می تواند به یک کامپیوتر از طریق USB متصل شود و علاوه بر آن دارای یک اسلات کارت حافظه نیز می باشد. انرژی این ربات هم از طریق یک اتصال USB (اگر اتصال سیمی ربات به کامپیوتر دشوار باشد) و یا چهار باتری AA قابل شارژ هیبرید فلزی نیکل تامین می شود.

برای بهره مندی بیشتر افراد، همه سخت افزارها و نرم افزارهای این ربات منبع باز بوده و بسیار قابل دستکاری می باشند.
ربات Arduino باید تا پایان این ماه ار طریق فروشندگان مختلف و یا وبسایت این کمپانی با قیمت حدود 265 دلار در دسترس قرار گیرد.
منبع : gizmag
موضوعات مرتبط: رباتیک ، تکنولوژی نو ، ،

در چهارم و پنجم ماه ژوئن، مسابقات فینال سری رقابتهای رباتیک دارپا (DRC) در Fairplex در Pomona کالیفرنیا برگزار میشود. در این مسابقات که بازدید از آن برای عموم آزاد است، 25 گروه بینالمللی برای کسب جایزهی 3.5 میلیون دلاری رقابت مینمایند. در ادامه نگاهی بر جزئیات این رقابتها داریم.
برگزاری مسابقات رباتیک دارپا با الهام از فاجعهی هستهای Fukushima در پی سونامی 2011 ژاپن، که خرابیهای به بار آمده مانع از رسیدن امدادگران و کارگران به دریچههای گاز و بستن آنها و در نتیجه آسیب دیدن راکتورها بوده است، برگزار میشوند. اگرچه در آن حادثه نهایتا رباتها به مکانهای آسیب دیده وارد شدند، اما دارای عملکرد کندی بودهاند.



این واقعه دارپا را بر آن داشت تا رقابتهایی را برای توسعهی بیشتر رباتهای نیمه خودکار که قابل فعالیت در مناطق آسیب دیده به جای ابزارها و انسانها باشند، برگزار نماید. در ژوئن 2013، یک رقابت مجازی با حضور 26 گروه با استفاده از رباتهای شبیهسازی آغاز شد. این رقابت در با یک رقابت فیزیکی و حضور 16 تیم با استفاده از رباتهای واقعی و کابلی برای عبور از روی موانع و انجام وظایفی با استفاده از ابزارها، ادامه پیدا کرد.

رقابت امسال، شاهد حضور 25 گروه خواهد بود. نیمی از این گروهها از ایالات متحده، پنج گروه از ژاپن، سه گروه از کره، دو گروه از آلمان و تک گروههایی از ایتالیا، هنگکنگ و چین میباشند. این گروهها برای دریافت درمجموع 3.5 میلیون دلار رقابت مینمایند، شامل دو میلیون دلار برای گروه اول، یک میلیون دلار برای گروه دوم و پانصد هزار دلار برای گروه سوم. رباتهای شرکت کننده میتوانند از انواع مختلف انساننما، رباتهای چهارپا و رباتهای ردیاب باشند اما همهی انواع باید بدون نیاز به منبع انرژی خارجی، پشتیبانی مکانیکی و با قابلیتهای ارتباطی محدود با کنترلرهای خود، به عملیات بپردازند. دیدگاه اصلی مسابقات DRC 2015، سختتر کردن سطح رقابتها برای رباتها نسبت به گذشته است.

دکتر گیل پرات، مدیر برنامههای DRC میگوید: "بخش قابل توجهای از رباتهای شرکتکننده در طول رقابت با مشکلات زیادی مواجه خواهند شد. اما ما این پیچیدگی را به عمد به وجود آوردهایم. دارپا خطرات زیادی را برای جایزههای قابل توجهی خود در نظر گرفته است، از این رو باید انتظار رقابتهای بسیار سختی را داشت."


در طول این مسابقات دو روزه، هر ربات برای هر کدام از هشت رقابت خود یک ساعت زمان دارد، که این هشت وظیفه باید به ترتیب و پس از هم انجام شوند. هر ربات باید به منطقهی حادثه رانده شده، به سمت ساختمان مورد نظر راه یابد، یک در را باز نماید، یک شیرفلکه را بچرخاند، و یک سوراخ در دیوار ایجاد نماید. در این مدت، سطح ارتباطات بسیار پایین خواهد بود از این رو رباتها باید با درجهی بالایی از خودمختاری عمل نمایند.




تفاوت عمدهی این رقابتها با رقابتهای 2013 در آن است که این بار رباتها به هیچ گونه کابل امنیتی متصل نمیبشند، از این رو در صورت افتادن بر روی زمین، هر ربات باید خود به تنهایی بلند شده و به مسیر ادامه دهد. در صورتی که ربات افتاده بر زمین قادر به ادامه نباشد، گروه شرکتکننده میتواند از ربات دیگری برای کمک به ربات اصلی و کسر ده دقیقه از زمان به عنوان جریمه اقدام نماید. تمامی این قابلیتها نیاز به رابطها، سنسورها و نرمافزار پیشرفته دارند. علاوه بر این، رباتها باید از باتریهای پیشرفتهای استفاده کنند.
دارپا از عموم مردم برای تماشای این رقابتها و دیدن تفاوت میان رباتهای داستانهای علمی-تخیلی و رباتهای واقعی دعوت به عمل آورده است. قطعا با شروع این رقابتها خبرهای بیشتری را منتشر خواهیم کرد.
منبع : gizmag
موضوعات مرتبط: رباتیک ، الکترونیک ، ،

در کشور ژاپن، رباتهای انساننما بخش مهمی از راهحلهای جبران کمبود نیروی کار انسانی و اجتماع مسن این کشور را تشکیل میدهند. اولین چالش پیشرو در این رویکردها، تبدیل رباتها به بخش عادی جامعه با انجام وظایف روزانه میباشند، که به همین دلیل ربات کوچک NAO مجموعهی Aldebaran Robotics یک دورهی کارآموزی دو هفتهای را در بانک Mitsubishi UFJ شهر توکیو گذراند. در ادامهی نحوهی چگونگی کار این ربات را در بانک شرح میدهیم.

ربات NAO در سال 2006 ساخته شد و اخیرا با کمک به کودکان در یادگیری نوشتن در سوئیس، بار دیگر کانون توجهات شد. NAO در طول دو هفته کارآموزی خود در بانک توکیو، به مشتریان در رسیدن به پاسخ پرسشها یا درخواستهایشان به زبانهای چینی، انگلیسی و ژاپنی کمک نمود. پیش از این رباتهای ASIMO هوندا و برادر جوانتر نائو، ربات Pepper هم به عنوان متصدی پذیرش به کار گرفته شدند.

ربات 58 سانتیمتری NAO در بانک و در مواجهه با مشتریان، پرسشهایی مانند "چگونه میتوانم به شما کمک کنم؟" یا "آیا میخواهید حساب جدیدی را باز کنید؟" یا "آیا به دنبال یک دستگاه ATM میگردید؟" را به همراه حرکات دست مطرح مینماید.



نحوهی تعامل با این ربات هم بسیار ساده است. مشتریان باید از لیست کلمات و عبارات از پیش چاپ شده سوالاتی را مطرح کنند، به پرسشهای نائو با بله یا خیر پاسخ دهند و همچنین باید به خاطر داشته باشند که توانایی شنیداری زبان انگلیسی ربات نائو هم کمی ضعیف است.

موضوعات مرتبط: رباتیک ، تکنولوژی نو ، ،

ربات Big Dog (سگ بزرگ) از بوستون داینمیکس ممکن است به طور کامل جایگزین Beefier LS3 شود. اما این بدین معنا نیست که کاملا جایگزین آن شود. این شرکت در این ماه یک نسخه چهار پا با یک بازو به عنوان سر (یا دم) را معرفی کرده است. این ربات قدرت بلند کردن و پرت کردن یک بلوک سنگین را داراست. این ربات توسط آزمایشگاه تحقیقاتی ارتش ایالات متحده، طوری طراحی شده است که از تمام نیروهای دینامیکی بدن خود برای پرتاب بلوک استفاده می کند. این ربات چندین مرحله را قبل از چرخش و شتاب دادن بازوی خود طی می کند.ابتداً خود را کمی بالا می کشد- مانند ورزشکاری که می خواهد دیسکی را پرتاب کند- که به طور زیادی قدرت پرتابش را افزایش دهد.


در مورد تعادل ربات می توان گفت هیچ رباتی به اندازه ی بیگ داگ نمی تواند تعادل خود را حفظ کند در نتیجه به راحتی می تواند از پس هر تست و آزمایشی برآید.تا حدودی گیج کننده است که در پیکربندی جدید، این ربات از دو بازو استفاده نمی کند، فرمی که پیش تر توسط محققان مطرح شده بود. در سال 1990 دولت مردان ژاپنی از یک ربات انسان نمای بازرسی نیروگاه هسته ای رونمایی کردند که روی چهار پا راه می رفت. ایده ی این ربات این گونه بود که از ترکیب پایداری چهار پا با بعضی از قابلیت های انسان بود. اخیراً تیمی در انستیتو تکنولوژی ایتالیا طرحی را با اضافه کردن یک جفت بازو به ربات چهار پای HyQ،احتمالاً به دلایل مشابه، رونمایی کردند.
شاید با یک یا دو دست، بیگ داگ – که میلیون ها دلار برای توسعه هزینه برمیدارد- بتواند به سربازان در انجام ماموریت های سنگین کمک نماید. همچنین، اگر در نسخه های بعدی دو بازو برای بلند کردن اجسام تعبیه شود، بیگ داگ توانایی بلند کردن اجسام سنگین تر از این را خواهد داشت.
منبع : gizmag
موضوعات مرتبط: رباتیک ، الکترونیک ، تکنولوژی نو ، ،

اگرچه هنوز کارهای زیادی باید انجام شود تا ربات های مینیاتوری دقیقا مانند حشرات حرکت کنند، اما آزمایشگاه میکرورباتیک هاروارد با تازه ترین نمونه خود، گام های بلندی در این زمینه برداشته است. این گروه به تازگی نمایشی از میکروربات سیار هاروارد (HAMR) خود، یک ربات چهارپای 4.4 سانتی متری را ارائه داده که می تواند بسیار سریع و در حدود 8.4 طول بدنه در هر ثانیه حرکت کند.
لطفا به ادامه مطلب مراجعه کنید!
موضوعات مرتبط: رباتیک ، الکترونیک ، ،
یک شرکت انگلیسی از یک دست پروتزی جدید رونمایی کرده که توسط یک برنامه تلفن همراه هوشمند قابل کنترل است.

شرکت «Touch Bionics» اعلام کرد که محصول فوق انقلابی«i-limb» آن با یک برنامه جدید «biosim» کنترل میشود.این برنامه که با جدیدترین محصولات اپل تطبیقپذیراست برای دستیابی سریع کاربران این دستهای مصنوعی به ۱۴ الگوی حرکتی و گرفتن طرحی شده است.این محصول برخلاف سایر پروتزهای رایج، به ارائه پنج انگشت کارا شامل انگشت شست با قابلیت گردش کامل به منظور ارتقاء مهارت پرداخته است.سازندگان این دستاورد را یک پیشرفت چشمگیر در فناوری i-limb خود خواندهاند.قدرت گردش انگشت شست به طور مستقیم توسط علائم عضله کاربر یا به طور خودکار به عنوان بخشی از الگوی حالت از پیش تعیین شده قابل کنترل است.گزینه جدید «گرفتن سریع» از برنامه کنترلی تلفن همراه biosim به کاربران اجازه میدهد تا به طور خودکار ۲۴ الگوی مختلف حرکت دست را بر روی پروتز خود با یک فشار بر روی نمایشگر فعال کنند.شرکت Touch Bionics در ماه ژانویه از دستیابی به ۱۰ میلیون پوند فروش سالیانه برای اولین بار خبر داده بود. طبق گزارشهای این شرکت همچنین درآمد آن در سال ۲۰۱۲ پس از توسعه خطوط تولید تا ۱۷ درصد افزایش داشت.این توسعه شامل راهاندازی دست پروتزی « i-limbفوقالعاده» و ارتقایی برای راهحل رقمی آن برای افراد فاقد انگشت بوده است.
موضوعات مرتبط: رباتیک ، الکترونیک ، تکنولوژی نو ، ،
ربونات از نظر قدرت، از ربات های چالاک و ماهر قبلی که شبیه انسان بودند پیشی گرفت؛ اما بدلیل رعایت ایمنی، بهتر است که فعلاً در کنار انسانها کار کند. این ربات می تواند اشیا 20 پوندی را با دستانش بالا برده و در فاصله نزدیک یا دور از بدنش نگه دارد. این مقدار حدود چهار برابر سنگین تر از مقداری است که سایر رباتهای ماهر قبلی نگه می داشتند.

ربونات 2، اولین ربات انسان نماست که حتی به فضا هم رفته است. آن از طریق فضاپیمای اکتشافی شاتل به ایستگاه فضایی بین المللی منتقل شده است. این ربات، یک ربات ماهر و چالاک بوده که توسط مهندسان ناسا و جنرال موتورز طراحی شده است و در حال انجام اولین ماموریت خود به سر می برد. صدایی مسلسل وار از این ربات تکرار می شود که می گوید: من در فضا هستم! سلام کیهان!

وزن این ربات بیش از 300 پوند بوده و از آلومینیوم و فولاد ساخته شده است و می تواند تا 20 پوند را با هر یک از دستانش بلند کند. هزینه ساخت آن بالغ بر 2.5 میلیون دلار بوده و دارای 38 پردازشگر کامپیوتری است. کریس وردیین ,یکی از مهندسین الکترونیک در پروژه ربونات ناسا، به دنیای کامپیوتر گفت:" فضانوردان و هیات اعزامی به فضا نیازمندند که با این ربات احساس راحتی کنند و این اولین ربات شبیه انسان در فضاست. من تصور می کنم آن در شروع کارش می تواند بسیار ترسناک باشد. اگر شما فیلمی درباره رباتها دیده باشید می توانید این طور حس کنید که آن واقعاً ترسناک است."

موضوعات مرتبط: رباتیک ، الکترونیک ، تکنولوژی نو ، ،

موضوعات مرتبط: رباتیک ، الکترونیک ، تکنولوژی نو ، ،