



کمپانی خودروسازی هیوندا از روبات اسکلتی جدیدی پرده برداشت که می توان آن را در زمینه های مختلفی همچون کاربردهای نظامی و یا خط تولید کارخانه ها مورد استفاده قرار داد
این روبات به گونه ای طراحی شده است که افراد می توانند آن را همانند لباس، بر تن کرده و از قدرت آن برای بلند کردن اجسام سنگینی حتی بیشتر از ۱۰۰ کیلوگرم بهره گیرند. حتی می توان اجسام سنگین را از پله ها و با کمترین فشاری به بدن بالا برد.
هیوندا در بیانیه ای در این خصوص عنوان کرد:”این روبات پوشیدنی برای کاربردهای تجاری مختلفی طراحی شده و توسط مهندسان این شرکت در دست توسعه است. همچنین می توان از این روبات برای تقویت قدرت و توان در افراد معلول و یا مسن که از توانایی کمی برای راه رفتن و یا انجام کارهای روزمره خود برخوردارند استفاده کرد.”
موضوعات مرتبط: رباتیک ، تکنولوژی نو ، ،

چند ماه پیش بود که آئودی اعلام کرد که در قالب پروژه ای به نام ” Mission to the Moon ” در حال ساخت یک ربات ماه پیما با همکاری گروهی از دانشمندان علوم هوا، فضا بوده و اطلاعاتی از این خودرو که Lunar Quattro نام دارد منتشر نمود.حالا این کاوشگر ساخته شده و آئودی آن را به نمایشگاه خودرو دیترویت آورده است.

شاید بتوان گفت کوچکترین وسیلهای که در نمایشگاه خودرو دیترویت ۲۰۱۶ معرفی شده، کاوشگر Lunar Quattro شرکت آئودی باشد که هدف اصلی آئودی از ساخت و ارسال آن به کره ماه، شرکت در رقابت XPRIZE Competition شرکت گوگل باشد، رقابتی که گوگل شرکتهای مخلتف را به تولید کاوشگری کوچک دعوت نموده و از آنها خواسته تا آنها را برای طی کردن مسافت حداقل ۵۰۰ متری، به ماه بفرستند. کاوشگر شرکت آئودی نیز به همین منظور تولید شده و سازندگان از یک دوربین بسیار با کیفیت نیز برای این کاوشگر استفاده نمودهاند که میتواند علاوه بر ثبت تصاویری بسیار با کیفیت، ویدئوهای با کیفیت فوقالعاده بالایی را نیز ثبت نماید.

شاید بزرگترین و قابل توجهترین تلاشی که آئودی داشته، این باشد که کاوشگر کوچک آنها وزن بسیار پایینی دارد. به چرخهای این وسیله نگاه کنید، با اینکه آنها به وسیلهی پرینتر سهبعدی و از جنس آلومینیوم تولید شدهاند، اما اندازهای بسیار بزرگ داشته و وزنی آنها نیز فوقالعاده پایین است. با توجه به ساختههای قبلی آئودی، باید بدانید که وزن این کاوشگر تا حد زیادی نسبت به نسخههای قبلی کاهش پیدا کرده که این میزان، ۲۰۰ گرم به ازای هر چرخ بوده است.




البته باید بدانید که چنین کاهش وزنی، حدود ۸۰ هزار یورو برای آئودی آب خورده و البته هدف این شرکت نیز چیزی جز این موضوع و رسیدن به این وزن پایین نبوده است.

در بخش بالایی این کاوشگر، یک پنل با اندازهی ۳۰۰ سانتیمتر مربع قرار گرفته که وظیفهی آن، شارژ کردن باتریهای یونلیتیومی داخل کاوشگر میباشد. البته نوع این باتریها با آنچه که در گوشیهای هوشمند مورد استفاده قرار میگیرد، تفاوت زیادی دارد.

قابلیت چرخش ۳۶۰ درجهی چرخهای کاوشگر Lunar Quattro نیز همانند آن چیزیست که هفتهی گذشته ناسا با رونمایی Mars Rover در پایگاه فضایی جانسون، پیش روی علاقهمندان قرار داد. در این مورد نیز باید بگوییم که با قرار گرفتن یک کاوشگر با فاصلهی چندین هزار مایلی، افزایش دادن کارایی چرخها و رساندن آن به حداکثر خود، شاید بهترین کار باشد.

موضوعات مرتبط: رباتیک ، تکنولوژی نو ، ،

یافتن مسیر در فرودگاههای بزرگ شهرهای ناآشنا اغلب کار سخت و گمراه کنندهای است. درحالیکه دریافت مسیر درست از فردی به شما کمک خواهد کرد، اما بهتر از آن وجود فردی برای بردن شما به مقصد مورد نظر میباشد. و در اینجاست که Spencer وارد عمل میشود. Spencer درواقع یک ربات چند زبانی است که به منظور هدایت مسافران در فرودگاهها طراحی شده است.

کار این پروژه از فرودگاه KLM هلند آغاز شد تا از هزینههای ایجاد شده مسافران به دلیل از دست دادن پرواز، کاسته شود. پژوهشگران و تاجران پنج کشور اروپایی اکنون در
توسعهی این ربات نقش دارند.
Spencer با یک نقشهی داده از فرودگاه مورد نظر بارگذاری شده و قادر به تعیین موقعیت فعلی خود از طریق مجموعهای از سنسورها مانند شتابسنجها و لیزرهای مکانیاب است. این ربات از لیزرهای اشاره شده همچنین برای جلوگیری از برخورد به اشیای مسیر و برآورد نزدیکی خود به علائم آشنا استفاده میکند.

ربات Spencer با شروع کار خود از سیام نوامبر در فرودگاه بینالمللی آمستردام، تحت دورهی یک هفتهای آزمایشی قرار میگیرد و تست وسیعتر این ربات نیز در ماه مارس صورت خواهد گرفت. این تکنولوژی درنهایت قابل اعمال بر روی همهی رباتهایی است که نیاز به تعامل با انسانها دارند، مانند رباتهای پرستار.
موضوعات مرتبط: رباتیک ، تکنولوژی نو ، ،

در بخش رباتهای انساننما شاهد رباتهای خوبی مانند آسیمو، والکایری و اطلس هستیم که همواره مورد ارتقا قرار میگیرند، اما اینها تنها نمونههای موجود در این بخش از صنعت رباتیک به شمار نمیروند. سومین نسخه از ربات سورنای دانشگاه تهران در روز دوشنبهی گذشته معرفی شده است.

سورنا III که به عنوان یک پلتفرم رباتیک تحقیقاتی طراحی شده، توسط گروهی در مرکز سیستمهای پیشرفته و تکنولوژی (CAST) دانشگاه تهران به سرپرستی پروفسور عقیل یوسفی ایجاد شده است.

این ربات 190 سانتیمتر ارتفاع و 98 کیلوگرم وزن داشته و به چهار اندام مفصلی مجهز است. ربات سورنا با شش درجه آزادی در هر پا، هفت درجه در هر بازو، یک درجه در هر دست، یک درجه در نیمتنه و دو درجه در گردن خود همراه است. این مفصلها با موتورهای EC نصب شده در بدنهی تحتانی و بستههای موتور سروو در بدنهی بالایی حرکت میکنند.

سومین ربات سورنا قادر به انجام فعالیتهایی مانند گذر از مسیرهای مستقیم و منحنی، بالا و پایین رفتن از شیبها و پلهها، حرکت بر روی سطوح ناهموار، و در دست گرفتن اشیا است.

این ربات همچنین قادر به برقراری ارتباط با افراد به لطف داشتن ماژولهای بینایی، شناسایی صدا (به زبان پارسی) و حرف زدن است و در آن نیز نرمافزار سفارشی توسعه یافته توسط سیستم اجرایی ربات اجرا میشود. سورنا قادر به نظارت بر سنسورهای آنبرد خود، شناسایی اشیا/صورتها، و تقلید از حرکات انسانها است.

بر اساس اعلام دانشگاه تهران، سورنا III چهار سال تحت با فعالیت بیش از 70 نفر از شش موسسهی مختلف ایرانی تحت توسعه قرار داشته است. ربات اولیهی سورنا در سال 2008 (آذر ماه سال 1387) ساخته شد.
منبع : gizmag
موضوعات مرتبط: رباتیک ، الکترونیک ، تکنولوژی نو ، ،

طی نیم دههی گذشته به خوبی درک شد که فرستادن فضانوردان به محیط سخت و نامطلوب فضا هم خطرناک و هم گران قیمت است. در راستای یافتن شیوهای برای کاستن از این خطر و هزینه، ناسا دو ربات انساننمای آزمایشی را به مدرسه فرستاده است! درواقع این آژانس فضایی دو ربات R5 Valkyrie را به گروههای دانشگاهی در MIT و دانشگاه شمال شرقی برای تحقیقات و توسعهی پیشرفته از فضانوردان رباتیک ارسال کرده است.
ناسا این دو دانشگاه را از رقابت میان گروههای دانشگاهی شرکت کننده در رقابتهای رباتیک 2015 دارپا (DRC) انتخاب کرده است. هر کدام از این دو گروه یک ربات R5 را دریافت نمودند.

ربات انساننمای R5 با ارتفاع 1.9 سانتیمتر و وزن 125 کیلوگرم، یک ربات شگفتانگیز است که توسط مرکز فضایی جانسن ناسا و دانشگاه تگزاس و Texas A&M ساخته شده است. این ربات دارای بستهی قدرت داخلی، یک مجموعه سنسور و دوربین، و اندام جداشدنی است. این ربات درواقع برای حوادث زمینی طراحی شده و در رقابتهای رباتیک دارپا 2013 نیز حضور داشت که البته نتایج ضعیفتر از حد انتظار را از خود نشان داده و در انتهای ردهبندی قرار گرفت. اکنون این ربات به میدان بازگشته تا هدف نهایی کمک به توسعهی رباتهای فضانورد را به مرحلهی عمل برساند.
علاوه بر رباتها، هر گروه سالانه و به مدت دو سال 250 هزار دلار بودجه را از هیئت ماموریتهای تکنولوژیکی فضایی (STMD) دریافت مینمایند تا به روند تحقیق و توسعهی آنها سرعت داده شود. علاوه بر این، گروهها از حمایت فنی مجازی و واقعی ناسا نیز برخوردارند.
این رباتها بخشی از چالش رباتیک فضایی آیندهی ناسا خواهند بود. این چالشها که شامل رقابتهای مجازی برای شبیهسازهای رباتیک و رقابتهای فیزیکی برای دو ربات ارتقایافتهی R5 هستند، با هدف ایجاد نرمافزار بهتر برای تولید رباتهای فضایی انساننمای بهتر اجرا خواهند شد.
موضوعات مرتبط: رباتیک ، ،

با الهام از حشرات قایقران، گروهی از دانشمندان دانشگاه بریستول Row-bot را طراحی کردند، یک نمونهی آزمایشی از ربات که میتواند با ورود به دریاچهها و مخازن آب کثیف، میکروبها را بخورد. سپس از این تغذیه برای تامین انرژی لازم خود استفاده مینماید.

Row-bot متشکل از دو بخش اصلی است: مکانیزم پیشرانه برای حرکت ربات به اطراف که از پدالی با قدرت یک موتور دیسی کوچک 0.75 وات استفاده میکند، و شکم مصنوعی ربات که در آن سلول سوخت میکروبی (MFC) جریان الکتریکی موتور را تامین مینماید.
کل سیستم با بلعیدن آب توسط ربات آغاز به کار میکند و MFC از باکتریهای درون آن انرژی الکتریسیته را تولید کرده و این انرژی امکان راهاندازی پدال را میدهد. سپس این حرکت به Row-bot اجازهی به درون کشیدن آب کثیف بیشتری را داده و این فرایند بارها تکرار میشود.

حشرات قایقرانی که Row-bot از آنها الهام گرفته شده، دارای پاهای پوشیده شده با مو هستند تا از شدت کشش سطحی در حین راه رفتن آنها بر روی آب کاسته شود. به همین ترتیب طراحی پدالهای Row-bot برای افزایش بهرهوری تغییر کرده است. هر پدال که از ساختار کامپوزیت چاپ سهبعدی به همراه فریم محکم پشتیبانی شونده توسط یک غشای الاستیک ساخته شده، به منظور افزایش سطح پدال در طول مرحلهی قدرت، انبساط مییابد. این غشا دارای لولایی است که زاویهی حمله بر روی بخشی از پدال که زیر آب میماند، را تغییر میدهد تا از سطح رویی و درنتیحه کشش آن کاهش یابد. MFC بکار رفته در Row-bot شبیه به یک سلول سوخت معمولی است، به جز اینکه به جای استفاده از سوختهای معمولی این سلول از باکتریها برای تولید جریان الکتریکی استفاده میکند.

پژوهشگران بر این باورند که این دستگاه میتواند در کاربردهای مختلفی مورد استفاده قرار گیرد مانند نظارت از راه دور و بررسیهای محیطی و عملیات پاکسازی.
نتایج این تحقیقات اخیرا در قالب مقالهای در کنفرانس بینالمللی سیستمها و رباتهای هوشمند 2015 IEEE/RSJ در هامبورگ آلمان ارائه شده است.
موضوعات مرتبط: رباتیک ، الکترونیک ، تکنولوژی نو ، ،
به گزارش زوملینک پشه جاسوسی ارتش آمریکا که به تازگی لو رفته، نسبت به جسه کوچک خود قابلیت های تعجب برانگیزی دارد. اين پشه مصنوعي با کنترل از راه دور علاوه بر دوربين مخفي و ضبط صدا ، خود يک آزمايشگاه کامل است که با گرفتن نمونه سلول فرد و با آناليز DNA آن و تطبيق آن با بانک اطلاعاتي خود، اطلاعات شخص را مخابره مي کند. در ضمن ميتواند يک Micro RFID را به پوست شخص تزريق کند که رديابي او را ساده کند. بدون اينکه شخص بفهمد.

موضوعات مرتبط: رباتیک ، الکترونیک ، تکنولوژی نو ، ،

مجموعهی Terrafugia، توسعهدهندهی خودروی پرنده، طراحیهای جدیدی را برای مدل برنامهریزی شدهی TF-X خود منتشر نمود. TF-X، یک خودروی خودکار پرنده است که در سال 2013 معرفی شد. طراحی ارتقایافتهی این خودرو، یک بدنهی باریکتر را نشان میدهد و مدل مقیاس یک دهم آن قرار است در تونل باد در MIT مورد تست واقع شود.

Terrafugia قبل از معرفی مدل TF-X، به اولین نمایش عمومی از اولین مدل خودروی پرندهی خود، Transition، پرداخت. درحالیکه Transition نیاز به یک باند پرواز برای تیکآف داشت، اما TF-X قادر به تیکآف و فرود عمودی است.
Terrafugia هدف از این پروژه را تامین حملونقل خانه به خانهی واقعی اعلام کرده است. TF-X به گونهای طراحی شده که تا چهار سرنشین را در خود جای دهد و دارای پرواز کنترل شونده توسط کامپیوتر است که به اپراتور اجازهی تعیین مقصد را داده و سپس کافیست فرمان تیکآف را به این خودروی پرنده داد.

به منظور اجرای پرواز، طراحی TF-X دارای بالهای تاشوندهای به همراه دو محفظهی موتور الکتریکی نصب شده به انتهای بدنه است. قدرت این موتورها توسط یک انجین 300 اسببخار تامین شده و میتوانند از موقعیتهای عمودی به افقی در صورت نیاز در حین تیکآف، کروز و فرود تغییر کنند. یک فن فشار لازم را برای این پرنده تامین کرده و خودرو دارای سرعت کروز 322 کیلومتر/ساعت و همچنین محدودهی پرواز 805 کیلومتر است.

همانند تیکآف، فرود نیز به صورت خودکار برای TF-X طراحی شده است. به محض نشستن بر روی زمین، بالهای خودرو در کمتر از چند ثانیه تا شده و به این ترتیب خودرو با استفاده از موتور پلاگین هیبریدی خود مناسب راندن بر روی جاده خواهد شد.

مدل مقیاس یک دهم این طرح در تونل بادی برادران رایت در موسسه فنی ماساچوست (MIT) تست خواهد شد، Transition نیز در همین مکان مورد آزمایش قرار گرفت. این تست به اندازهگیری کشش، قدرت بالابری و نیروهای فشار طراحی جدید کمک میکند. شبیهسازیهای پرواز شناور، تبدیل به پرواز مستقیم و پرواز تماما مستقیم نیز از برنامههای این تست است.
طبق اعلام Terrafugia، خودروی پرندهی TF-X هشت تا دوازده سال دیگر تحت توسعه قرار دارد.
منبع : gizmag
موضوعات مرتبط: رباتیک ، تکنولوژی نو ، خودرو ، ،

لیونل مسی ، بهترین بازیکن فوتبال جهان در مصاف با یک روبات تقریبا ناکام بود.
ژاپنی ها یک روبات دروازه بان تولید کردند و برای محک زدن عملکرد آن، مسابقه ای میان این دروازه بان و بهترین بازیکن فوتبال جهان ترتیب دادند.
به گزارش روزنامه های انگلیس ، فیلم مسابقه مسی و این روبات در تلویزیون ژاپن پخش شد و اکنون تعداد بازدید های آن در اینترنت هر لحظه بالا می رود.
این بازیکن آرژانتینی که در این فصل تاکنون 57 گل به ثمر رسانده و لرزه بر تن بسیاری از مربیان اروپایی انداخته در دو ضربه پنالتی نخست خود به این روبات ناکام بود.
تصاویر این مبارزه نشان می داد که مسی در چالش است تا راهی برای غلبه بر این ماشین پیدا کند. او سه ضربه پنالتی زد که دو ضربه نخستش را روبات به خوبی مهار کرد.


هرچند که همه از قدرت مافوق انسانی مسی در به ثمر رساندن گل می گویند ولی این مسابقه نشان داد که او هم ˈانسانˈ است.
منبع: http://www.irna.ir
موضوعات مرتبط: رباتیک ، ،

تا کنون ربات های انسان نمای زیادی ساخته شده که می توانند روی دو پای خود ايستاده و حتی راه بروند. اما رباتی که در تصویر مشاهده می کنيدprimer-v2 نام دارد. این یکی جزو دسته ربات های ورزشکار به حساب می آید و گونه از ربات های انسان نما است که می تواند دوچرخه سواری کند.
دکتر Guero محققی از دانشگاه اوساکا، در يک کار گروهی با محققين دانشگاه بوستون موفق به طراحی اين ربات دوچرخه سوار شده است. اين ربات به راحتی می تواند بر روی دوچرخه خودش بنشيند و با حفظ تعادل بدون آنکه تلو تلو بخورد، در مسيری تعیین شده با سرعت 10 کيلومتر بر ساعت حرکت کند. کنترل سرعت و حفظ تعادل آن علاوه بر ژیروسکوپ داخلی آن توسط یک کنترل کننده خارجی نيز امکان پذير است.
دوچرخه اين ربات فاقد ترمز است و او برای متوقف کردن از دو پای خود استفاده می کند. اين ربات صرفا برای عملی کردن بحث تعادل و حرکت ربات ها طراحی شده و هنوز نمی توانیم مطمئن باشیم که بتواند در مسابقه های دوچرخه سواری در آينده به رقابت با انسان بپردازند!
حفظ تعادل برای ما انسان ها به نظر ساده می آید اما واقعیت این است که فرایند بسیار پیچیده ای است که ربات ها هنوز در آن مشکلات زیادی دارند اما با سرعت مشغول آموختن آن هستند و باید منتظر باشیم و ببینیم چه زمانی ربات های انسان نما می توانند از نظر حفظ تعادل به پای انسان برسند.
منبع: http://narenji.ir
موضوعات مرتبط: رباتیک ، ،

یك دانشمند ایرانی با استفاده از ماده ای كه سالها پیش اختراع كرده، دست به ساخت یك نسخه روباتیك از گیاه ونوس حشره خوار زده كه می تواند حشرات را به تله بیاندازد .
به گزارش سرویس فناوری خبرگزاری دانشجویان ایران(ایسنا)، محسن شاهین پور، استاد مهندسی مكانیك دانشگاه «مین» (Maine) در مقاله ای كه در مجله Bioinspiration & Biomimetics منتشر شده به توضیح در مورد چگونگی استفاده از این نانوماده موسوم به «کامپوزیت پلیمر فلز یونی»(IPMC) پرداخته كه با تقلید از عملكرد عضلات در بازسازی قابلیت های حس كردن و بسته شدن گیاه ونوس حشره خوار مورد استفاده قرار می گیرد.
دكتر شاهین پور برای ساخت این روبات، دو تكه برگ مانند را از این ماده برای تقلید از شكل دهان مانند ونوس حشره خوار ایجاد كرد.
وی سپس با یك نوار مسی قسمت ستونی آن را ساخته و برای نسخه برداری از موهای ریز روی حشره خوار كه مانند حسگر عمل می كنند، از نوارهای بسیار ریز ماده IPMC استفاده كرد. سایر قسمت های روبات از یك رله عادی و سیستم مولد ولتاژ ساخته شده است.
ماده جدید به كار رفته در این روبات از دو راه كار می كند. اول این كه به دلیل ویژگی های منحصر به فرد ماده IPMC، تنها لمس كردن آن باعث تولید یك ولتاژ كوچك می شود. دومین راه، خمش یا پیچیدگی عضله مانند آن بوده كه در زمان شارژ شدن ماده بوجود می آید.
نوارهای كوچك درون این روبات كه به عنوان حسگر عمل می كنند، در زمان لمس شدن از خود یك شارژ كوچك به ژنراتور ولتاژی بازپخش می كند كه آن نیز یك شارژ بزرگتر را به برگها ارسال كرده و منجر به خم شدن آنها بهسوی یكدیگر می شود.
ماده ابداعی توسط این دانشمند ایرانی در زمان گرفتن شارژ و در پی توزیع مجدد یون ها، خم می شود.
شاید در نگاه اول این روبات بیشتر شبیه یك پروژه كوچك جالب برای یك مهندس به نظر برسد كه قصد ساخت یك چیز ساده و كوچك را دارد اما در نگاه دقیق تر، این روبات در حقیقت، نمایشی از یك گونه جدید فناوری است كه می تواند به پیشرفتهای بیشتر در كاربردهای پزشكی منجر شود. برای مثال یك نمونه كاربردی پالایش شده آن ممكن است در آینده به عنوان جایگزین عضلات انسانی یا كمك به برنامه های کاربردی حسگر مورد استفاده قرار گیرد. از جمله مثالهای آن می توان به بازسازی حالات صورت در افرادی كه در پی سكته این قابلیت را از دست داده اند، اشاره كرد.
همچنین از آن جا كه روبات دكتر شاهین پور از قابلیت شكار حشرات نیز برخوردار است، ممكن است بتوان در آینده از این فناوری برای استفاده به عنوان ابزار ساخت روبات هایی با قابلیت تغذیه خود بهره برد.

موضوعات مرتبط: رباتیک ، ،

ظاهرا آیودی تنها بر روی زمین نقش ندارد، بلکه قرار است تجربهی خود را در ماه نیز پیادهسازی کند. ظاهرا این کمپانی خودروسازی آلمانی به ارایهی پشتیبانی فنی یک گروه علمی پرداخته که در حال کار بر روی تولید ماهنورد رقابت Lunar XPRIZE گوگل هستند.

لوکا دیمیو، عضو بخش بازاریابی و فروش آیودی اعلام کرده است: "ما میخواهیم الهامبخش دیگران در پیوستن به این نوع پروژهها باشیم." این تکنولوژی آیودی از محرک تمام چرخ Quattro و همچنین ساختار سبکوزن آن گرفته شده که منجر به تحرک الکتریکی و رانندگی خودکار میشود. دیمیو سخنان خود را اینگونه ادامه داده است: "طرح ماموریت خصوصی به ماه فوقالعاده است. و ایدههای نوآورانه این چنینی نیاز به حمایت دارند. ما با شرکت خود در این پروژه میخواهیم الهامبخش سایر کمپانیها جهت ترویج این دانش باشیم."

گروهی که آیودی در حال همکاری با آن است، تنها گروه آلمانی شرکتکننده در رقابتهای Google Lunar XPRIZE میباشد و در حال کار بر روی یک موشک پرتاب به سمت ماه میباشند.
منبع : ubergizmo
موضوعات مرتبط: رباتیک ، تکنولوژی نو ، ،

سنجاقکها دارای مغزی به اندازهی یک دانه برنج بوده و چشمان آنها قادر به دیدن وسعت چشم انسانها نمیباشند. با این حال در زمان ردیابی یک سوژهی متحرک، این حشره بسیار خوب عمل میکند. این حشرات میتوانند شکار خود را با سرعت 60 مایل بر ساعت تعقیب کرده و در 97% موارد موفق به گرفتن شکار میشوند. اکنون گروهی از پژوهشگران دانشگاه آدلاید استرالیا از نتایج کسب شده از تحقیقات بر روی سنجاقکها و سایر حشرات به منظور بهبود و ارتقای بینایی کامپیوتر استفاده میکنند.
یکی از پیچیدهترین چالشهای پیشروی رباتها در بینایی دقیق و مناسب، ردیابی سوژههای متحرک در یک پسزمینه ترکیبی میباشد. انسانها قادر به اجرای این ویژگی اما با دقت خیلی بالا هستند. این عملیات نیاز به قدرت مغزی زیاد داشته و ما به خوبی حشرات نمیتوانیم در این موارد از چشمان خود استفاده کنیم. ما باید شی را شناسایی کرده، آن را از بکگراند جدا کرده، و بر روی آن و ردیابی حرکات آن تمرکز کنیم. گروه پژوهشگران فوق به دلیل ذکر شده به جای شبیهسازی تیزی بینایی انسانها برای ردیابی سوژههای متحرک به معکوس آن روی آوردهاند.
الگوریتمهای توسعه داده شده در دانشگاه آدلاید به تقلید از ردیابی بینایی حشرات با تمرکز بر پسزمینه به جای تمرکز بر هدف استفاده کرده و سپس به هدف اجازهی حرکت برخلاف آن را دادهاند. این رویکرد از حواسپرتی کاسته و به سیستم زمان بیشتر جهت محاسبهی مسیر سوژه را میدهد. این سیستم بینایی اکتیو، به انجام حرکات کوچک جهت تحت دید داشتن هدف اقدام میکند اما تمرکز آن همچنان بر روی پسزمینه میباشد.
در تستهای اولیه، این الگوریتم بیست برابر سریعتر از الگوریتمهای ردیابی هدف معمولی انجام گرفت. با این حال فعلا تنها با شبیهسازی مواجه هستیم. این تکنولوژی هنوز بر روی یک ربات اجرا نشده است که گام بعدی گروه دانشگاه آدلاید میباشد. این گروه اکنون در حال کار بر روی انتقال الگوریتم بینایی اکتیو به یک ربات است که شاید قادر به ردیابی بهتر نسبت به دستگاههای دیگر باشد.
منبع : geek
موضوعات مرتبط: رباتیک ، تکنولوژی نو ، ،
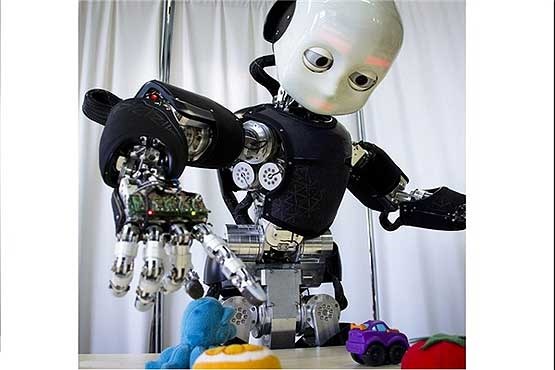
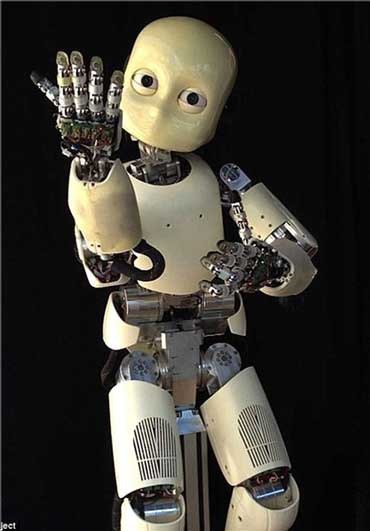
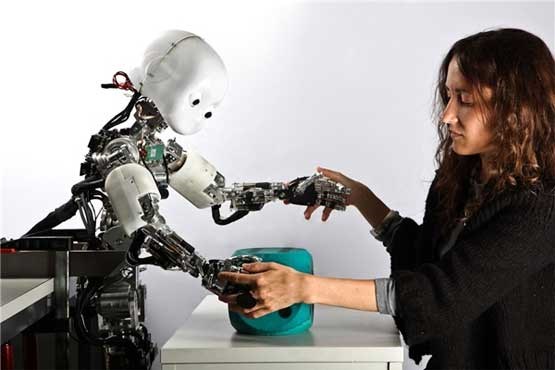
این ربات انسان نما ظاهری شبیه به یک کودک دارد و دارای حس لامسه و احساسات است.
iClub نام رباتی است که دارای احساسات است و قادر به خندیدن، عصبانی شدن، بازی و دارای حس لامسه است
این ربات انسان نما توسط چند دانشگاه اروپایی از سال 2006 طراحی و توسعه داده شده است، ظاهر این ربات شگفت انگیز مانند یک کودک است و مانند یک کودک نیز رفتار می کند؛ iClub قادر به درک چندین زبان است و با کودکان بازی می کند.
منبع:جام جم
موضوعات مرتبط: رباتیک ، ،

آیا تا به حال در مورد رباتهایی که توانایی ترمیم سریع خود را داشته باشند یا بتوانند در کمترین زمان ممکن با آسیب خود کنار بیایند، فکر کردهاید؟ این پروژهی جالب اکنون زیر نظر پژوهشگران رباتیک در حال انجام است. در این پروژه، رباتها قابلیت شناسایی آسیب دیدن را دریافت کرده و تستهایی به منظور بهبود و ترمیم آسیبدیدگی خود اجرا میکنند و پس از ترمیم یا تطابق درست مانند یک ربات سالم به عملیات خود ادامه خواهند داد.
تنظیم حرکات این نوع رباتها به عهدهی نوعی الگوریتم هوشمند جدید است که به بررسی راهحلهای مختلف و انتخاب بهترینشان در کمتر از یک دقیقه میپردازد. این پروژه تحت نظر Jean-Baptiste Mouret در دانشگاه UPMC فرانسه در حال اجرا است. ایدهی آن ساخت رباتهای کمتر شکنندهای است که همانند یک حیوان آسیب دیده عمل میکنند، به این طریق که بهترین راهحل ادامهی فعالیت خود را پیدا خواهند کرد.
موفقیت این پروژه و ابداع رباتهایی با توانایی تطبیق و ترمیم آسیبها کاربردهای زیادی خواهد داشت. برای مثال، میتوان چنین رباتهایی را به منظور بازدید از سایر سیارات یا سیارکها فرستاد و اگر عملیات فرود چندان خوب صورت نگیرد، وجود قابلیت تطبیق با آسیب میتواند در ادامهی ماموریت بسیار مهم باشد. از نمونههای کاربرد این نوع رباتها بر روی سیاره زمین نیز میتوان به رباتهای پزشکی، رباتهای ساختوساز و رباتهای جستجوگر اعماق اقیانوسها اشاره کرد.
منبع : geek
موضوعات مرتبط: رباتیک ، سخت افزار ، ،

با نزدیک شدن به زمان آغاز مسابقات رباتیک دارپا در پایان هفته، این رقابت داغتر شده است. پس از انتشار خبرهایی از ربات چیتای MIT، اکنون نوبت به خودنمایی ربات دوپای ATRIAS دانشگاه ایالت اورگن رسیده است. گروه پشت این ربات شترمرغ مانند، تازهترین استعداد خود را نشان داده، توانایی راه رفتن بدون بینایی بر روی موانع بلند در مسیر.

پروژهی ATRIAS که محصول آزمایشگاه رباتیک دینامیک دانشگاه ایالت اوریگن است، بر روی علم حرکت و دویدن تحقیق کرده و دارای هدف ساخت یک ربات است که بتواند زمینهای ناهموار را بدون واژگون شدن طی کند.
اکنون این گروه توانستهاند به ربات خود قابلیت پرش بر روی یک پلتفرم بلند 15 سانتیمتری را ببخشند. برخلاف ربات چیتای MIT که مجهز به سیستم LIDAR برای شناسایی موانع پیش از این پرش از روی آنهاست، ATRIAS تنها به برداشتن گامهای بلند اقدام میکند.

ربات ATRIAS در مسابقات رباتیک دارپا که از جمعه آغاز میشود، شرکت دارد. با شروع این مسابقات اطلاعات و خبرهای بیشتری را در اختیارتان قرار خواهیم داد.
منبع : gizmag
موضوعات مرتبط: رباتیک ، تکنولوژی نو ، ،
سگ بزرگ :در شرکت بوستون دینامیک یک ربات چهارپای غژ غژ کنان تولید شد که big-dog نام گرفت . این ربات به عنوان یک باربر در خدمت ارتش ساخته شد . بودجه این پروژه توسط دارپا (آژانس پروژه های تحقیقاتی پیشرفته دفاعی) تامین شد ، زیرمجموعه ای از وزارت دفاع ایالات متحده که وظیفه توسعه تکنولوژی های جدید رابرای ارتش به عهده دارد . big-dog می تواند روی چهار پای خود خیلی متعادل گام بردارد و به عنوان یک وسیله نقلیه زمخت سربازان را در همه جا همراهی کند . این ربات می تواند تا 150 کیلوگرم محموله را حمل کند و نیز سرعت خود را تا حداکثر 6.4 کیلومتر در ساعت حفظ کند

موضوعات مرتبط: رباتیک ، ،
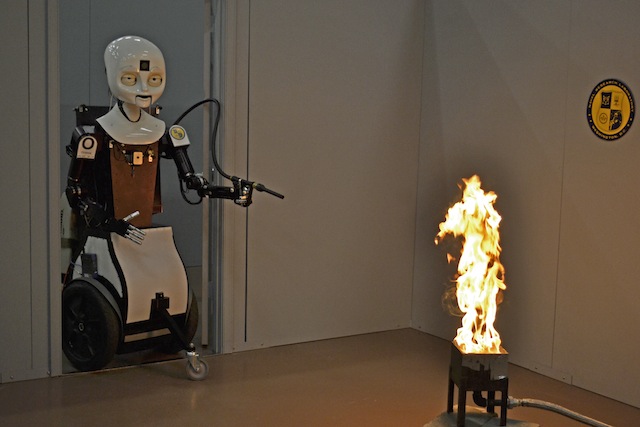
ربات آزمایشگاه تحقیقات نیروی دریایی امریکا ، یک ماشین انسان نما با شاید کمی از ویژگی های ظاهری خزندگان . اکتاویا یک ربات آتش نشان است که برای کمک به مهندسان به منظور تست تکنولوژی های جدید طراحی شده است تا دستیار نیروهای ناوگان دریایی ایالات متحده باشداکتاویا طراحی شده تا با انسان در تعامل باشد و مهندسان تلاش می کنند تا راه هایی پیدا کنند که ربات انسان ها را تشخیص داده و دنبال کند ، بفهمد آن ها چه می گویند و حرکاتشان را تشخیص دهد . سرانجام دانشمندان امیدوارند اکتاویا بتواند شانه به شانه انسان ها به عنوان یک هم تیمی کار کند البته با قابلیت های تشخیص بصری و گفتاری پیچیده !
موضوعات مرتبط: رباتیک ، ،
آرکاس میوزیک بینی یک سیستم پخش موسیقی بی سیم مجهز به دو اسپیکر بلوتوث است که در داخل کلاه کار گذاشته شده اند. از این رو، کاربر نه تنها در زمستان از سرما محافظت می شود بلکه به موسیقی مورد علاقه خود نیز گوش می دهد. کنترل های پخش موسیقی و همچنین یک میکروفون برای برقراری تماس در کنار کلاه قرار دارند. عرضه این محصول برای ماه اکتبر برنامه ریزی شده است.

منبع:اخبار تکنولوژی - عصرایران
موضوعات مرتبط: رباتیک ، تکنولوژی نو ، ،
این دستگاه غیر معمول و پیچیده کاربردی دو منظوره دارد. نخست، از آن می توان به عنوان یک دوربین کیفیت بالا با لنز واید 135 درجه برای نظارت بر خانه، شناسایی صدا و حرکت، و ارسال نوتیفیکیشن در زمان بروز یک رویداد استفاده کرد. دوم، ویتینگز هوم قادر به نظارت بر کیفیت هوا و بررسی آن برای شناسایی مواد شیمیایی آلی فرار مانند تمیز کننده ها است. بدنه جذاب این محصول از چوب ساخته شده و قیمت 219 دلاری را یدک می کشد.

منبع:اخبار تکنولوژی - عصرایران
موضوعات مرتبط: رباتیک ، ،
اسفیرو در نمایشگاه CES از یک توپ رباتیک رونمایی کرده بود. این شرکت در نمایشگاه ایفا 2014 نیز محصولی دیگر به نام Ollie را معرفی کرده است. این گجت که با یک اپلیکیشن اختصاصی کنترل می شود می تواند به سرعت 22 کیلومتر در ساعت دست یابد. این محصول قابلیت عبور از موانع را داشته و به تایرهای نابی Nubby"" (روکش های پلاستیکی) مجهز شده است. اسفیرو Ollie برچسب قیمت 150 دلاری را یدک می کشد.

منبع:اخبار تکنولوژی - عصرایران
موضوعات مرتبط: رباتیک ، ،
روبات iRobot PackBot در سال 2001 ساخته شد , اما تا بعد از واقعه 11 سپتامبر كارایی نداشت. از این روبات برای پیدا كردن افرادی كه در ویرانه های برج های دوقلو در نیویورك گرفتار شده بودند, استفاده كردند. این روبات به دلیل شكل خاصی كه دارد, می تواند به مكان های تنگ و تاریك وارد شود و از مانع بلند به راحتی عبور كند. این روبات می تواند درون آب هم شنا كند. علاوه بر این به كمك دوربین هایی كه درونش تعبیه شده, اجسام دور و برش را تشخیص می دهد و شی مورد نظرش را به وسیله چنگكی كه دارد بیرون می كشد.

موضوعات مرتبط: رباتیک ، ،

اگرچه استفاده از پهبادهای شخصی در حال زیاد شدن است، اما هنوز عدهی زیادی از افراد از کار با ملخهای این دستگاهها وحشت دارند. اما این پرههای چرخان نه تنها ممکن است موجب آسیب رساندن به انسانها شوند، بلکه در طی تصادفات و سقوطها نیز میتوانند آسیب ببینند. به همین دلیل شرکت کالیفرنیایی Polyhelo به ساخت Nano Tornado اقدام نمود که یک کوادکوپتر محسوب میشود اما به جای پایههای باز از چهار فن کانالی استفاده میکند.

مزایای زیادی در طراحی منحصربفرد Nano Tornado وجود دارد. ابتدا، در صورت برخورد به انسانها آسیبی به آنها نمیرسد، همچنین اجزای این کوادکوپتر در صورت برخورد به اشیا یا فرود بد آسیب نمیبینند. به این ترتیب میتوان از آن در عملیات با ریسک بالا مانند پرواز در نزدیکی شاخههای درختان یا در فضاهای تنگ استفاده کرد.
از آنجایی که خبر از بازو یا ملخ رو به بیرون نیست، میتوان به راحتی این کوادکوپتر را در کیفهایی جهت حملونقل قرار داد. علاوه بر این اگر یک مکان تیکآف/فرود خوب وجود نداشته باشد، این کوادکوپتر میتواند موقعیت خود را در هوا تثبیت کرده و سپس بر روی دست یک انسان فرود آید. زمان پرواز این کوادکوپتر تنها پنج دقیقه است، اگرچه باتری آن قابل تعویض با یک باتری شارژ شده میباشد.
منبع : gizmag
موضوعات مرتبط: رباتیک ، تکنولوژی نو ، ،

اگرچه پیش از این شاهد توسعهی چندین نوع بازوی پروتزی کنترل شونده توسط قدرت تفکر بودهایم، اغلب آنها با ایمپلنتهایی کاشته شده درون کورتکس حرکتی مرکز کنترل حرکات مغز انسان، عمل میکنند. درنتیجه حرکت بازوها تاحدی نامنظم بوده، همچنین معمولا تاخیری میان تفکر کاربر و حرکت بازوها وجود دارد. با این حال، اکنون گروهی از پژوهشگران نتایج یک آزمایش را منتشر کرده که در آن این محدودیتها تا حد زیادی کاهش یافتهاند.
در سال 2013، اعضای این گروه – متشکل از دانشمندان کالتک، کالج پزشکی USC Keck، و مرکز توانبخشی ملی Rancho Los Amigos – یک جفت از مجموعهی الکترودهای 4x4mm را در کورتکس پاریتال پشتی (PPC) فردی معلول با نام اریک جی.سورتو کاشتند. برخلاف کورتکس حرکتی که به کنترل مستقیم حرکات میپردازد، PPC مسئول قصد و تفکر و تصمیم به حرکت است.
این مجموعهها در دو بخش از PPC آقای سورتو قرار گرفتند، یکی از آنها برای کنترل تصمیم حرکت بازوها و دیگری برای گرفتن یک وسیله. هر کدام از این مجموعهها حاوی 96 الکترود هستند که به نوبهی خود به نظارت بر فعالیت یک نورون میپردازند. کابلهای کشیده شده از محفظهی جمجه به دو مجموعه الکترود، به یک سیستم کامپیوتری متصل بوده که فعالیت عصبی را به فرامین حرکتی رمزگشایی میکند. سپس این کامپیوتر اقدام به ارسال این فرامین به بازوی رباتیکی مینماید.
پس از مدتی آموزش، سورتو اکنون قادر به استفاده از بازو برای اجرای فعالیتهایی مانند لرزاندن دست، نوشیدن نوشیدنی، و حتی بازی سنگ-کاغذ-قیچی میباشد، علاوه بر این حرکات دست وی اکنون نرمتر و منظمتر صورت میگیرد. او همچنین با استفاده از یک رابط میتواند به کنترل حرکات اشارهگر روی نمایشگر کامپیوتر بپردازد.
منبع : gizmag
موضوعات مرتبط: رباتیک ، تکنولوژی نو ، ،

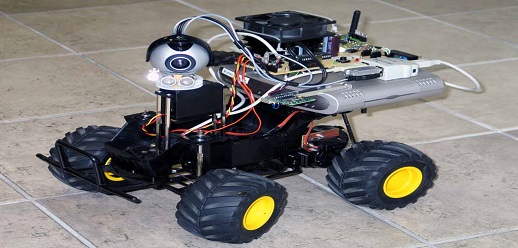
کمپانی Arduino در طول چند سال گذشته توانسته با میکروکنترلرهای تک بورد خود، شهرت زیادی کسب کند. بسیاری از این وسیله ها در ربات ها بکار می روند و این کمپانی با توجه به همین مساله در حال حاضر گام منطقی بعدی خود را به سمت جلو برداشته و به انتشار اولین ربات کامل خود دست زده است.


این ربات 178 در 102 میلی متری با نام ربات Arduino، یک دستگاه چرخ دار دایره ای است که از دو بورد موجود Arduino بهره می برد. بورد کنترل آن که در بالا قرار گرفته، اطلاعات سنسورهای مختلف آن را خوانده و موجب واکنش ربات طبق برنامه داده شده، می شود. بورد موتور در قسمت پایین، موتورها را که دو چرخ را هدایت می کنند، کنترل و نظارت می نماید. دو گوی چرخ کوچک بدون انرژی، در مقابل چرخ ها و برای پشتیبانی از ربات قرار گرفته اند.


برخی از سنسورهای استاندارد و محرک شامل یک قطب نمای دیجیتال، سنسورهای مادون قرمز، صفحه نمایش ال سی دی رنگی، بلندگو، سنسور بستر، LED های نمایش دهنده فعالیت و دو پتانسیومتر در این دستگاه وجود دارند. دستورات ساده را می توان از طریق یک پد کلید کنترل داخلی، برنامه نویسی کرد اگر چه ربات همچنین می تواند به یک کامپیوتر از طریق USB متصل شود و علاوه بر آن دارای یک اسلات کارت حافظه نیز می باشد. انرژی این ربات هم از طریق یک اتصال USB (اگر اتصال سیمی ربات به کامپیوتر دشوار باشد) و یا چهار باتری AA قابل شارژ هیبرید فلزی نیکل تامین می شود.

برای بهره مندی بیشتر افراد، همه سخت افزارها و نرم افزارهای این ربات منبع باز بوده و بسیار قابل دستکاری می باشند.
ربات Arduino باید تا پایان این ماه ار طریق فروشندگان مختلف و یا وبسایت این کمپانی با قیمت حدود 265 دلار در دسترس قرار گیرد.
منبع : gizmag
موضوعات مرتبط: رباتیک ، تکنولوژی نو ، ،

در چهارم و پنجم ماه ژوئن، مسابقات فینال سری رقابتهای رباتیک دارپا (DRC) در Fairplex در Pomona کالیفرنیا برگزار میشود. در این مسابقات که بازدید از آن برای عموم آزاد است، 25 گروه بینالمللی برای کسب جایزهی 3.5 میلیون دلاری رقابت مینمایند. در ادامه نگاهی بر جزئیات این رقابتها داریم.
برگزاری مسابقات رباتیک دارپا با الهام از فاجعهی هستهای Fukushima در پی سونامی 2011 ژاپن، که خرابیهای به بار آمده مانع از رسیدن امدادگران و کارگران به دریچههای گاز و بستن آنها و در نتیجه آسیب دیدن راکتورها بوده است، برگزار میشوند. اگرچه در آن حادثه نهایتا رباتها به مکانهای آسیب دیده وارد شدند، اما دارای عملکرد کندی بودهاند.



این واقعه دارپا را بر آن داشت تا رقابتهایی را برای توسعهی بیشتر رباتهای نیمه خودکار که قابل فعالیت در مناطق آسیب دیده به جای ابزارها و انسانها باشند، برگزار نماید. در ژوئن 2013، یک رقابت مجازی با حضور 26 گروه با استفاده از رباتهای شبیهسازی آغاز شد. این رقابت در با یک رقابت فیزیکی و حضور 16 تیم با استفاده از رباتهای واقعی و کابلی برای عبور از روی موانع و انجام وظایفی با استفاده از ابزارها، ادامه پیدا کرد.

رقابت امسال، شاهد حضور 25 گروه خواهد بود. نیمی از این گروهها از ایالات متحده، پنج گروه از ژاپن، سه گروه از کره، دو گروه از آلمان و تک گروههایی از ایتالیا، هنگکنگ و چین میباشند. این گروهها برای دریافت درمجموع 3.5 میلیون دلار رقابت مینمایند، شامل دو میلیون دلار برای گروه اول، یک میلیون دلار برای گروه دوم و پانصد هزار دلار برای گروه سوم. رباتهای شرکت کننده میتوانند از انواع مختلف انساننما، رباتهای چهارپا و رباتهای ردیاب باشند اما همهی انواع باید بدون نیاز به منبع انرژی خارجی، پشتیبانی مکانیکی و با قابلیتهای ارتباطی محدود با کنترلرهای خود، به عملیات بپردازند. دیدگاه اصلی مسابقات DRC 2015، سختتر کردن سطح رقابتها برای رباتها نسبت به گذشته است.

دکتر گیل پرات، مدیر برنامههای DRC میگوید: "بخش قابل توجهای از رباتهای شرکتکننده در طول رقابت با مشکلات زیادی مواجه خواهند شد. اما ما این پیچیدگی را به عمد به وجود آوردهایم. دارپا خطرات زیادی را برای جایزههای قابل توجهی خود در نظر گرفته است، از این رو باید انتظار رقابتهای بسیار سختی را داشت."


در طول این مسابقات دو روزه، هر ربات برای هر کدام از هشت رقابت خود یک ساعت زمان دارد، که این هشت وظیفه باید به ترتیب و پس از هم انجام شوند. هر ربات باید به منطقهی حادثه رانده شده، به سمت ساختمان مورد نظر راه یابد، یک در را باز نماید، یک شیرفلکه را بچرخاند، و یک سوراخ در دیوار ایجاد نماید. در این مدت، سطح ارتباطات بسیار پایین خواهد بود از این رو رباتها باید با درجهی بالایی از خودمختاری عمل نمایند.




تفاوت عمدهی این رقابتها با رقابتهای 2013 در آن است که این بار رباتها به هیچ گونه کابل امنیتی متصل نمیبشند، از این رو در صورت افتادن بر روی زمین، هر ربات باید خود به تنهایی بلند شده و به مسیر ادامه دهد. در صورتی که ربات افتاده بر زمین قادر به ادامه نباشد، گروه شرکتکننده میتواند از ربات دیگری برای کمک به ربات اصلی و کسر ده دقیقه از زمان به عنوان جریمه اقدام نماید. تمامی این قابلیتها نیاز به رابطها، سنسورها و نرمافزار پیشرفته دارند. علاوه بر این، رباتها باید از باتریهای پیشرفتهای استفاده کنند.
دارپا از عموم مردم برای تماشای این رقابتها و دیدن تفاوت میان رباتهای داستانهای علمی-تخیلی و رباتهای واقعی دعوت به عمل آورده است. قطعا با شروع این رقابتها خبرهای بیشتری را منتشر خواهیم کرد.
منبع : gizmag
موضوعات مرتبط: رباتیک ، الکترونیک ، ،

در کشور ژاپن، رباتهای انساننما بخش مهمی از راهحلهای جبران کمبود نیروی کار انسانی و اجتماع مسن این کشور را تشکیل میدهند. اولین چالش پیشرو در این رویکردها، تبدیل رباتها به بخش عادی جامعه با انجام وظایف روزانه میباشند، که به همین دلیل ربات کوچک NAO مجموعهی Aldebaran Robotics یک دورهی کارآموزی دو هفتهای را در بانک Mitsubishi UFJ شهر توکیو گذراند. در ادامهی نحوهی چگونگی کار این ربات را در بانک شرح میدهیم.

ربات NAO در سال 2006 ساخته شد و اخیرا با کمک به کودکان در یادگیری نوشتن در سوئیس، بار دیگر کانون توجهات شد. NAO در طول دو هفته کارآموزی خود در بانک توکیو، به مشتریان در رسیدن به پاسخ پرسشها یا درخواستهایشان به زبانهای چینی، انگلیسی و ژاپنی کمک نمود. پیش از این رباتهای ASIMO هوندا و برادر جوانتر نائو، ربات Pepper هم به عنوان متصدی پذیرش به کار گرفته شدند.

ربات 58 سانتیمتری NAO در بانک و در مواجهه با مشتریان، پرسشهایی مانند "چگونه میتوانم به شما کمک کنم؟" یا "آیا میخواهید حساب جدیدی را باز کنید؟" یا "آیا به دنبال یک دستگاه ATM میگردید؟" را به همراه حرکات دست مطرح مینماید.



نحوهی تعامل با این ربات هم بسیار ساده است. مشتریان باید از لیست کلمات و عبارات از پیش چاپ شده سوالاتی را مطرح کنند، به پرسشهای نائو با بله یا خیر پاسخ دهند و همچنین باید به خاطر داشته باشند که توانایی شنیداری زبان انگلیسی ربات نائو هم کمی ضعیف است.

موضوعات مرتبط: رباتیک ، تکنولوژی نو ، ،

ربات Big Dog (سگ بزرگ) از بوستون داینمیکس ممکن است به طور کامل جایگزین Beefier LS3 شود. اما این بدین معنا نیست که کاملا جایگزین آن شود. این شرکت در این ماه یک نسخه چهار پا با یک بازو به عنوان سر (یا دم) را معرفی کرده است. این ربات قدرت بلند کردن و پرت کردن یک بلوک سنگین را داراست. این ربات توسط آزمایشگاه تحقیقاتی ارتش ایالات متحده، طوری طراحی شده است که از تمام نیروهای دینامیکی بدن خود برای پرتاب بلوک استفاده می کند. این ربات چندین مرحله را قبل از چرخش و شتاب دادن بازوی خود طی می کند.ابتداً خود را کمی بالا می کشد- مانند ورزشکاری که می خواهد دیسکی را پرتاب کند- که به طور زیادی قدرت پرتابش را افزایش دهد.


در مورد تعادل ربات می توان گفت هیچ رباتی به اندازه ی بیگ داگ نمی تواند تعادل خود را حفظ کند در نتیجه به راحتی می تواند از پس هر تست و آزمایشی برآید.تا حدودی گیج کننده است که در پیکربندی جدید، این ربات از دو بازو استفاده نمی کند، فرمی که پیش تر توسط محققان مطرح شده بود. در سال 1990 دولت مردان ژاپنی از یک ربات انسان نمای بازرسی نیروگاه هسته ای رونمایی کردند که روی چهار پا راه می رفت. ایده ی این ربات این گونه بود که از ترکیب پایداری چهار پا با بعضی از قابلیت های انسان بود. اخیراً تیمی در انستیتو تکنولوژی ایتالیا طرحی را با اضافه کردن یک جفت بازو به ربات چهار پای HyQ،احتمالاً به دلایل مشابه، رونمایی کردند.
شاید با یک یا دو دست، بیگ داگ – که میلیون ها دلار برای توسعه هزینه برمیدارد- بتواند به سربازان در انجام ماموریت های سنگین کمک نماید. همچنین، اگر در نسخه های بعدی دو بازو برای بلند کردن اجسام تعبیه شود، بیگ داگ توانایی بلند کردن اجسام سنگین تر از این را خواهد داشت.
منبع : gizmag
موضوعات مرتبط: رباتیک ، الکترونیک ، تکنولوژی نو ، ،

اگرچه هنوز کارهای زیادی باید انجام شود تا ربات های مینیاتوری دقیقا مانند حشرات حرکت کنند، اما آزمایشگاه میکرورباتیک هاروارد با تازه ترین نمونه خود، گام های بلندی در این زمینه برداشته است. این گروه به تازگی نمایشی از میکروربات سیار هاروارد (HAMR) خود، یک ربات چهارپای 4.4 سانتی متری را ارائه داده که می تواند بسیار سریع و در حدود 8.4 طول بدنه در هر ثانیه حرکت کند.
لطفا به ادامه مطلب مراجعه کنید!
موضوعات مرتبط: رباتیک ، الکترونیک ، ،
یک شرکت انگلیسی از یک دست پروتزی جدید رونمایی کرده که توسط یک برنامه تلفن همراه هوشمند قابل کنترل است.

شرکت «Touch Bionics» اعلام کرد که محصول فوق انقلابی«i-limb» آن با یک برنامه جدید «biosim» کنترل میشود.این برنامه که با جدیدترین محصولات اپل تطبیقپذیراست برای دستیابی سریع کاربران این دستهای مصنوعی به ۱۴ الگوی حرکتی و گرفتن طرحی شده است.این محصول برخلاف سایر پروتزهای رایج، به ارائه پنج انگشت کارا شامل انگشت شست با قابلیت گردش کامل به منظور ارتقاء مهارت پرداخته است.سازندگان این دستاورد را یک پیشرفت چشمگیر در فناوری i-limb خود خواندهاند.قدرت گردش انگشت شست به طور مستقیم توسط علائم عضله کاربر یا به طور خودکار به عنوان بخشی از الگوی حالت از پیش تعیین شده قابل کنترل است.گزینه جدید «گرفتن سریع» از برنامه کنترلی تلفن همراه biosim به کاربران اجازه میدهد تا به طور خودکار ۲۴ الگوی مختلف حرکت دست را بر روی پروتز خود با یک فشار بر روی نمایشگر فعال کنند.شرکت Touch Bionics در ماه ژانویه از دستیابی به ۱۰ میلیون پوند فروش سالیانه برای اولین بار خبر داده بود. طبق گزارشهای این شرکت همچنین درآمد آن در سال ۲۰۱۲ پس از توسعه خطوط تولید تا ۱۷ درصد افزایش داشت.این توسعه شامل راهاندازی دست پروتزی « i-limbفوقالعاده» و ارتقایی برای راهحل رقمی آن برای افراد فاقد انگشت بوده است.
موضوعات مرتبط: رباتیک ، الکترونیک ، تکنولوژی نو ، ،
ربونات از نظر قدرت، از ربات های چالاک و ماهر قبلی که شبیه انسان بودند پیشی گرفت؛ اما بدلیل رعایت ایمنی، بهتر است که فعلاً در کنار انسانها کار کند. این ربات می تواند اشیا 20 پوندی را با دستانش بالا برده و در فاصله نزدیک یا دور از بدنش نگه دارد. این مقدار حدود چهار برابر سنگین تر از مقداری است که سایر رباتهای ماهر قبلی نگه می داشتند.

ربونات 2، اولین ربات انسان نماست که حتی به فضا هم رفته است. آن از طریق فضاپیمای اکتشافی شاتل به ایستگاه فضایی بین المللی منتقل شده است. این ربات، یک ربات ماهر و چالاک بوده که توسط مهندسان ناسا و جنرال موتورز طراحی شده است و در حال انجام اولین ماموریت خود به سر می برد. صدایی مسلسل وار از این ربات تکرار می شود که می گوید: من در فضا هستم! سلام کیهان!

وزن این ربات بیش از 300 پوند بوده و از آلومینیوم و فولاد ساخته شده است و می تواند تا 20 پوند را با هر یک از دستانش بلند کند. هزینه ساخت آن بالغ بر 2.5 میلیون دلار بوده و دارای 38 پردازشگر کامپیوتری است. کریس وردیین ,یکی از مهندسین الکترونیک در پروژه ربونات ناسا، به دنیای کامپیوتر گفت:" فضانوردان و هیات اعزامی به فضا نیازمندند که با این ربات احساس راحتی کنند و این اولین ربات شبیه انسان در فضاست. من تصور می کنم آن در شروع کارش می تواند بسیار ترسناک باشد. اگر شما فیلمی درباره رباتها دیده باشید می توانید این طور حس کنید که آن واقعاً ترسناک است."

موضوعات مرتبط: رباتیک ، الکترونیک ، تکنولوژی نو ، ،

موضوعات مرتبط: رباتیک ، الکترونیک ، تکنولوژی نو ، ،