



Andrew Baisch، ربات هایی را در بیش از پنج سال گذشته توسعه داده و دکترای خود را زیر نظر پروفسور راب وود کسب کرده است. مونتاژ سریع این نمونه ها توسط روش ساخت مدار پرینت میکروالکترومکانیکی (PC-MEMS) ممکن شده که در آن مواد در 23 لایه میکروسکوپی و برش های لیزر به الگوهایی در کنار هم قرار می گیرند. مواد انعطاف پذیر در الگو، به عنوان لولا خدمت می کنند و به پانل ها اجازه می دهند تا به اشکال سه بعدیِ بسیار شبیه به صفحات کتاب های پاپ آپ کودکان با اشکال سه بعدی، خم شوند (هر چند برخی از مولفه ها هنوز هم توسط دست مونتاژ می شوند)

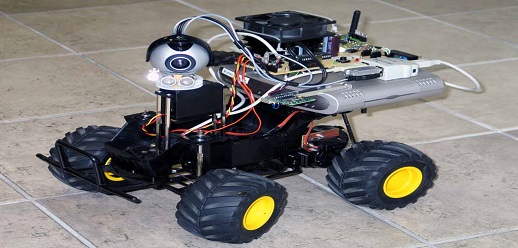
با مقیاس گذاری ساده فایل طراحی، آنها موفق به تولید یک نسخه با وزن تنها 270 میلی گرم شدند که در حدود اندازه یک سکه است. HAMR (میکروربات سیار هاروارد) بزرگتر دارای وزن 1.3 گرم بوده که قابل مقایسه با برخی از حشرات می باشد و مانند حشرات، HAMR می تواند بیش از وزن بدن خود، چیزی را حمل کند. با این حال، محرک های معمولی مانند موتورهای الکتریکی و یا هیدرولیکی برای آن بیش از حد بزرگ و سنگین هستند. در عوض، پاهای HAMR به جلو و عقب با فرکانس 70 هرتز می جنبند و قدرت خود را از 6 محرک پیزوالکتریک سرامیکی که توسط دو ورودی کنترلی ساده نظارت می شود، تامین می کنند.

یکی از مسائل مهم در محرک ها، ولتاژ بالای مورد نیاز آن هاست که ربات را به یک منبع قدرت خارجی وابسته می کند. با این حال، محققان با کمک کریستین هِیْملیچ، موفق به ساخت یک نمونه اولیه جامع با نام HAMR3 شده اند. این ربات، قدرت خود را دارد و دارای وزن 1.7 گرم می باشد، اما با توجه به باتری ولتاژ پایین تر، آهسته تر حرکت می کند.

پیشرفت های اخیر در باتری های چاپ سه بعدی در مقیاس میکرون، حتی می تواند به میکروربات های خودکار کوچک تر ختم شود، و شاید برای حفظ وزن پرواز Robobee آزمایشگاهی، مورد نیاز باله های آن باشد. با اینکه HAMR وابسته به منبع خارجی می باشد، اما چرخش به راست و چپ آن بسیار سریع است.

می توانید سرعت HAMR را در ویدئوی زیر مشاهده نمایید.
نظرات شما عزیزان:
موضوعات مرتبط: رباتیک ، الکترونیک ، ،
